Amidst Global Tensions and A Surge of New Manufacturers, Open-Source Has Risen as a Key Winner
With much of the industry discussing the pressures on DJI, rise of Blue sUAS offerings such as the Skydio X2 and the promise of autonomous drones, there has been one consistent force driving many of these larger trends. That is the rise of drones relying on open-source technologies, and the strengthening of open-source protocols themselves.
In this analysis, we break down data and share insights into the trajectory of the open-source drone ecosystem, and explore the impacts of open-source in the coming years.
Table of Contents 1. What is Open Source? 2. Why Open Source Now? 3. Scale of Open-Source Commercial Drones (updated data) 4. What's Next?
What is Open Source?
Open-source technologies are not a new element of the drone industry, with the two main open-source flight control projects – ArduPilot and PX4 – being started in 2009 and 2011. These open-source projects predate the availability of cheap, ready-to-fly drones in 2013 and establishment of a legal framework for commercial drone operations in the US in 2016.
Open-source technologies broadly refer to projects with a free-use license (note these licenses are not created equal) that are openly and publicly worked on by developers. The projects of interest may cover everything from flight control software and communication protocols to battery management systems.
Everything works around the flight control systems, with ArduPilot and PX4 reigning king among consumer and commercial imaging products. Chris Anderson and Jordi Munoz created Ardupilot, and they also went onto creating 3D Robotics. The PX4 Autopilot traces its origins back to a team at ETH Zurich led by Lorenz Meier, who later founded Auterion.
The critical difference here (besides the literal code) is the open-source licensing between the projects, each with its pros and cons. ArduPilot holds a GPLv3 license, while PX4 uses a BSD-3.
There’s much to say about the differences between both licenses. However, in summary:
GPLv3 allows for commercial use, modifying, distributing the code, the authors cannot be held liable for damages, and the users cannot sublicense the original work or any derivatives. In addition, you need to include copies of the original software and disclose any significant changes made to the codebase (under the same license). You are also required to display copyright. Lastly, if you are distributing the software as part of a product or service, you must include the information necessary to modify and reinstall the software.
BSD-3 also allows for commercial use, modifying, and distributing the code or derivatives. The authors cannot be held liable for damages, and the users cannot sublicense the original work or derivatives. You can place a warranty on the licensed software. You must include the original copyright and the full text of the license. The main difference is that with BSD-3, you are not required to disclose any derivative works of the source code or include information on modifying and reinstalling the software. One crucial factor is the trademark. You cannot use the original company or its members to endorse your work unless given explicit permission.
Disclaimer: This is only a summary and our interpretation of the full text of the licenses. No information listed here is legal advice.
While these two systems have their differences, they can often be used interchangeably with other open-source technologies (such as MAVLink communications protocol) even if they sit in the “opposite camp.”
Alongside the flight control software, the open-source community has built a variety of additional open-source technologies, a few of the more popular ones are:
- MAVLink communications protocol (Drone to RC protocol and allows 3rd party apps to communicate with the FC)
- QGroundControl control station software for MAVLink based drones, that runs indiscriminately on any mobile, or desktop OS.
- MAVSDK the best and easiest way to interface with MAVLink based vehicles via a unified, simple to use and cross platform API
We mapped out the ecosystem of key open-source projects in the image below.
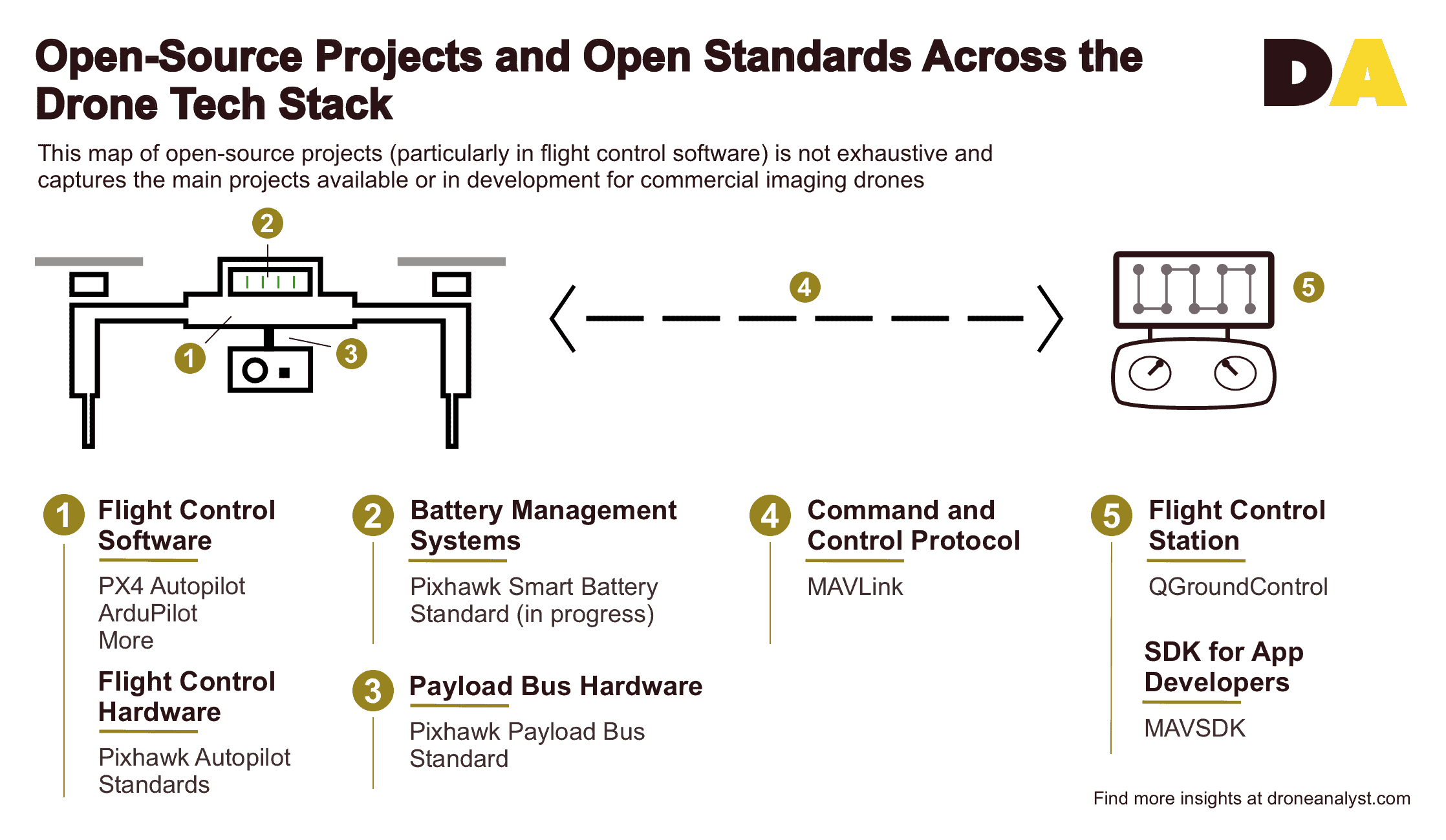
These open-source technologies enter the market through hardware standards published by Pixhawk, and adopted by manufacturers in their products. he development and community management of Pixhawk happens under the Pixhawk Special Interests Group (SIG) and all PX4-related open source projects are facilitated by the Dronecode Foundation. Despite ArduPilot leaving the Dronecode Foundation early on, the Pixhawk hardware standards and MAVLink are compatible with ArduPilot based drones. In this way, open-source flight controllers are interchangeable, with the key industry “standard” here being the MAVLink protocol.
Why Open Source Now?
There are two key elements driving the push for open-source drones, which are broadly fueled by geopolitical tensions between the US and China and the search for a true DJI competitor. These two elements are the rise of new (particularly American) hardware players and nationalistic procurement policies in the US.
In the case of new hardware players entering the market, we are seeing a multitude of small organizations trying to come to market quickly and capture market share. Considering the cost and complexity of developing a proprietary flight controller algorithm, it is much easier for these players to buy common flight controllers with open-source software. This is true for all new hardware firms outside of Skydio, whose $170 million Series D round puts them ahead of the pack in terms of capitalization and investment in core R&D. Even in the case of Skydio, they have adopted MAVLink and QGroundControl for government operators, to address requirements in our second element – new procurement policies.
As we have covered previously, the Blue sUAS Group has caught a lot of attention and has supported the birth of a new group of US-made drones. As part of the DIU’s Blue sUAS solicitations, they have continually required the use of open-source technologies. This began by requiring an architecture “built around an open source protocol” in Blue sUAS 1.0 solicitations to more specifically requiring “open source command and control protocols” in Blue sUAS 2.0 solicitations, which we should hear results from this year. A more recent solicitation for an all-purpose “Soldier Robotic Controller” called specifically for MAVLink compatibility, signalling that the MAVLink command and control protocol is becoming standard.
It’s fascinating to see the US military move quickly on open-source technologies, and speaks to the influence of the Defense Innovation Unit in changing US DoD procurement culture. It also speaks to the benefits of Open-Source projects for large enterprise users. With strict enforcement of standards, large enterprises can test or deploy multiple systems nearly interchangeably. Vetting of cybersecurity risks can similarly be streamlined, as code is published and commonly tested before procurement.
Scale of Open-Source Commercial Drones
So how well adopted are open-source technologies in the commercial drone segment? This has been hard to measure perfectly, as drone brands do not always have an incentive to publicly recognize their use of open-source technologies. Additionally, the industry’s dominant drone manufacturer, DJI, develops their own proprietary systems, pushing many open-source projects to military or higher-end niches of the market.
Despite all these caveats, known drone brands leveraging open-source technologies account for over a quarter (26%) of all commercial drones sold and the majority (70%) of non-DJI drones. This shows the oversized impact open-source technologies are having on the commercial market. This is also a big uptick from last year, where open source brands made up just 15% of all commercial drones sold, with growth concentrated among brands most deeply focused on open source technologies.
Table: Platform Market Share (By Units), Commercial Drones
| Platform | Overall Market Share | Adjusted Market Share (Excluding DJI) |
|---|---|---|
| Proprietary/Closed | 68% | 30% |
| Open Source FC | 17% | 38% |
| MAVlink Only | 9% | 21% |
| Undefined / DIY | 6% | 12% |
Source: DroneAnalyst 2021 Market Sector Report survey of 1,408 drone buyers.
Compared to our 2020 data, we saw the largest growth among brands using open source FCs, from just 6% to nearly triple at 17% of the market. This reflects broader trends in the hardware space, such as the diminishing market share of DJI and rise of US drone manufacturers – often young firms that benefit greatly from open source technology.
We expect this trend to continue as the market becomes more competitive and the open source ecosystem develops more robust add-ons that strengthen several airframes at once. We’ll continue to track this in our annual survey. Our 2022 variation of the survey is currently live, and you can participate online now here.
Note that previously this article tried to differentiate open source market shares by FC tech stack. After further exploration, we found that this is a fairly inaccurate way to look at the data, as many manufacturers may frequently move between them depending on specific customer requirements, talent on staff and more.
What’s Next?
With open-source powered-drones rising alongside many new hardware brands, it’s important to think about the larger implications these technologies will have on the industry.
Around the corner, we expect to see a surge in slightly larger, diverse, US-made and MAVLink compatible airframes in response to the Blue sUAS 2.0 solicitation. Most notably this will be seen in the “drone platform” category where DJI M300-equivalent airframes such as the FreeFly Astro, Ascent Aerosystems Spirit and Inspired Flight IF1200 exist. These platform-style airframes are perfect for leveraging open ecosystems and expansions of open standards to modular payloads. The more open nature of the 2.0 solicitation also spells for a more diverse set of these airframes.
We are also seeing deeper integration and capabilities among a more focused niche of the open-source ecosystem built around Auterion. Started in 2017 by founders of PX4 and Pixhawk, Auterion develops additional proprietary software that extend the capabilities of open-source drones for large operators. This primarily consists of their Auterion Suite software that helps control and manage fleets of compatible drones but has extended to certain hardware components as needed by hardware manufacturers.
This more focused ecosystem of open-source players is critical to unlocking integrated solutions for enterprises and tapping into increasingly autonomous deployments.
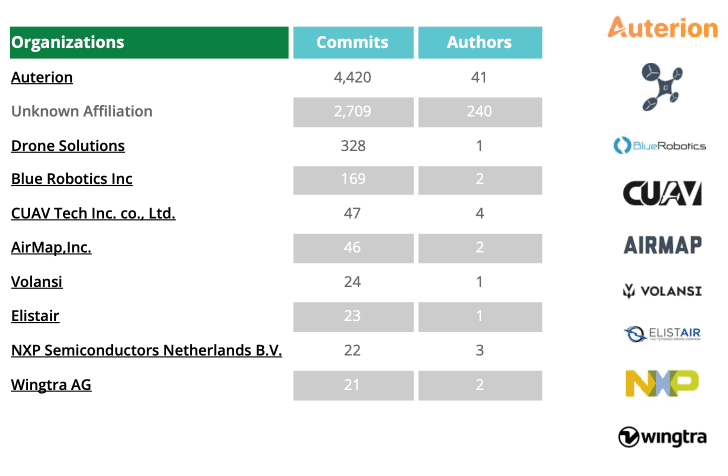
These open-source systems are spreading to more advanced drone operations as well. A recent Dronecode report highlighted firms authoring the most commits to their open-source tech stacks, including companies working on delivery (Volansi), surveying (Wingtra), tethered solutions (Elistair), UTM (AirMap) and more. What may be more interesting is that underwater drone developer Blue Robotics was the fourth largest contributor (by commits), signalling that these UAV-first technologies may have broader appeal in the robotics industry.
All that goes to show that the drone open-source community is not just here to stay but has shaped the industry from its very beginning. While it has originally played a role among manufacturers, developers and hobbyists, we are starting to see a broader role and trust in open-source technologies for enterprise.
Thanks to Dronecode Foundation’s program manager, Ramon Roche, for his help throughout my research process and contributions to the open source community.
We’re currently collecting data for the 2022 version of this dataset and more. You can participate in that survey here: https://droneanalyst.typeform.com/22-survey
It’s important to remember that open source technology has influenced more than just the commercial drone space and has long provided hobbyists and FPV drone pilots affordable and modular options. You can explore some of the best FPV drones online to find more on the subject.
Where to Find More Insights
- We calculate the size of the hardware drone market and recent financials from DJI and Parrot
- Dive into the new US Drone hardware ecosystem and trends among the US Military UAS fleet
- Learn how DJI’s drone dominance was born, the consumer market faltered and may rise again.
- Understand the four forces that shaped the drone industry in 2020.

I doubt your numbers on Open Source Market share are correct.
For both ArduPilot and PX4, companies prefer to hide that they are using Open Source Autopilot for numerous reason despite the licenses, so that is mostly impossible to track. You should put a disclaimer and a link your source for those numbers as they cannot be taken for granted.
If you need help, I can help you review drone companies in France and class them with the autopilot they are truly using without saying it.
Keen eye, you are correct. I’ve mostly had to track down brands associated with the orgs behind these standards, or have connections to someone who knows. So the data is more of a minimum. The source is there already (proprietary survey dataset), and there are already 2 notes about the data, so I’ll leave this discussion up on the post for people who want to dive more into the weeds.
I’ll reach out when I review the list again with our 2021 dataset, thanks for offering to help.
What you did not say is the quality of the open source software. QC Ground is not on par with DJI Go app or other modern ground control apps. The user interface (UI) is often not intuitive and delivers a poor user experience (UX). The user interface uses QGC which is non-native to any specific platform. IMHO, as a professional software engineer, QGC and by extension QC Ground Control are not modern UI softwares. That’s not to say that PX4 is not up to the task. MAVSDK provides an API upon which a modern Ground Control UI can be built. *No disrespect intended to the open source developers of QGC or QC Ground Control.
Hi, this is David
Please visit sposync.com.
I am trying robots video streaming and steering service.
I am looking for standard interface or SDK compatible for
variety drones like in dronecode org.
For now, only drone – Pyparrot can be attached.
You can attach your robots if you have client-side code – python
(** it is in the instruction)
Hope this will enable more advanced robots service, in more intelligent way.
Thanks,